[@portabletext/react] Unknown block type "span", specify a component for it in the `components.types` prop
섬유의 자동 품질 검사란 무엇입니까?
섬유용 AI 결함 검출은 카메라와 AI 모델을 사용해 직기, 편직기, 가공 라인을 떠나는 원단을 관찰하고, 롤이 창고에 도달하기 전에 비적합 미터를 표시합니다. 4점 프레임의 검사원이나 경직된 룰 기반 머신 비전에 의존하는 대신, 모델은 자기 라인의 적합 및 비적합 원단 이미지에서 학습하고, 자기 실, 자기 빔, 자기 가공이 바뀌면 적응합니다.
공장 현장에서는 이를 인라인 원단 검사, AI 기반 결함 검출, 또는 섬유용 AI 비전이라고 부릅니다. 기술 패밀리는 동일합니다. 고정 카메라, 제어된 조명 셋업, 자기 라인의 예제로 학습된 AI 모델, 그리고 모든 미터가 검사되어 4점 등급에 대해 수락, 결함 클래스로 표시, 또는 거부되었다는 추적성 기록입니다.
하지 않는 것: 자기 직기 정비공, 자기 가공 화학자, 또는 자기 고객 감사를 대체하지 않습니다. 하는 것: 자기가 출하하는 미터가 사양에 통과한 미터와 일치하도록, 매 교대마다, 모든 품번에서, 청구 환수가 돌아왔을 때 컨버터에게 보여줄 수 있는 기록과 함께 보장합니다.
섬유 라인에서 잡아내는 결함
구멍, 끊긴 경사, 누락된 실
작은 구멍, 끊긴 경사 끝, 또는 한 가닥 이상의 실이 누락된 원단 구간입니다. 끊긴 바늘, 직기가 멈추지 않은 걸린 경사 끝, 또는 직조공이 잡지 못한 실 파단으로 인해 발생합니다. 균일한 백라이트가 있는 카메라는 단일 누락 끝이 나타나는 순간 잡아내며, 컷-앤-소우 라인이 스프레더에서 구멍을 찾을 때까지 기다리지 않습니다.
슬럽, 매듭, 실 결함
두꺼운 부분, 매듭, 넵, 그리고 실에 방적되어 직물이나 편물의 가시 융기로 나타나는 오염입니다. 업스트림 방적 결함, 부실하게 묶인 스플라이스, 또는 베일의 이물질 섬유로 인해 발생합니다. 자기 특정 실 카운트와 광택으로 학습된 카메라는 자기 허용 오차를 넘는 슬럽을 표시하고 원단에 속한 질감은 무시합니다. 룰 기반 시스템은 과도하게 표시하거나 놓칩니다.
위사 바와 바레 라인
픽 사이에 위사 장력, 위사 실 카운트, 또는 위사 염색 친화도가 드리프트한 원단을 가로지르는 수평 밴드입니다. 빔 교체, 실 패키지 교체, 또는 위사 장력 드리프트로 인해 발생합니다. 모든 미터에서 같은 품번을 보는 카메라는 사람이 고천장 조명 아래서 보기 전에 레이킹 라이트 아래 희미한 바레를 잡아내며, 다음 빔이 가동 길이를 두 배로 늘리기 전에 현장에 경고합니다.
니들 라인과 드롭 스티치
한 바늘이 휘어졌거나, 스티치를 놓쳤거나, 루프를 떨어뜨린 편직 원단의 수직 라인입니다. 마모된 바늘, 오일 부족 실린더, 또는 래치가 회복하지 못한 실 파단으로 인해 발생합니다. 환편기의 테이크다운에 있는 카메라는 라인을 몇 미터 안에 잡아내며, 몇 시간 동안 가동해 20 킬로그램의 실을 초로 변환하지 않습니다.
얼룩, 오일 자국, 오염
기계 오일, 손 접촉, 또는 가공에서 씻어내지지 않은 이물질로 인한 자국입니다. 누설 베어링, 더러운 가이드, 또는 경로에 잔여물을 남긴 정비 단계로 인해 발생합니다. 올바른 색상 보정이 있는 카메라는 사람의 눈이 지나칠 밝은 원단의 미세한 오일 자국을 잡아내며, 다운스트림 분류를 위해 미터를 롤에 묶습니다.
염색 불균일과 색조 변동
조각 염색되거나 제트 염색된 롤의 길이를 따라 줄무늬, 패치, 또는 느린 색조 드리프트입니다. 욕조 화학이 드리프트했거나, 온도 프로파일이 바뀌었거나, 순환 제트가 부분적으로 막혔다는 것을 알려줍니다. 가공 범위 출구의 카메라는 실험실이 대표 절단을 받기 몇 시간 전에 시작되는 미터의 색조 드리프트를 잡아냅니다.
그것이 시작 목록입니다. 온보딩 중에 자기 특정 라인에서 어떤 클래스가 가장 중요한지 보정하고 그에 따라 모델을 튜닝합니다.
섬유 라인에서 자동 시각 검사가 작동하는 방식
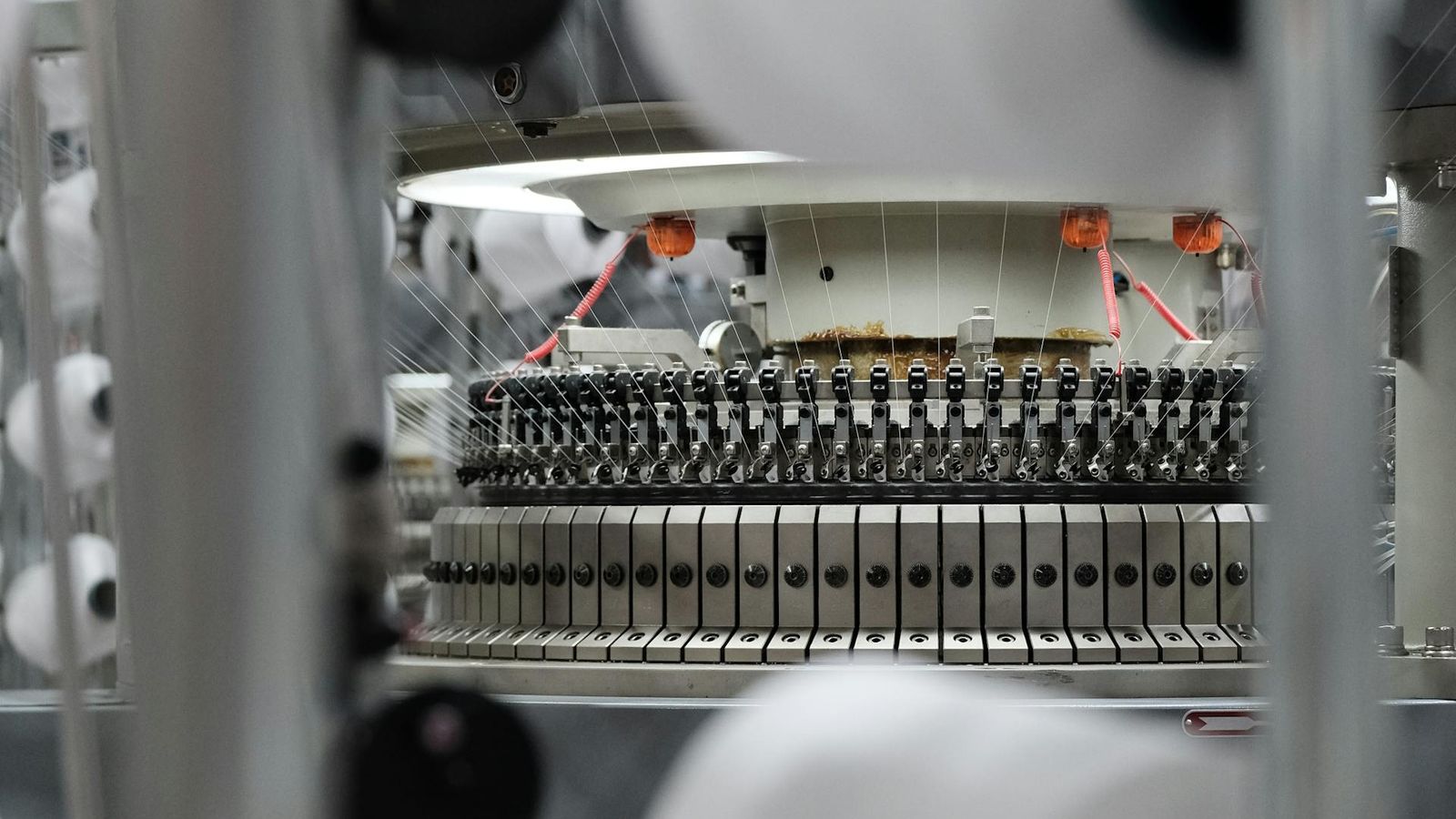
Enao로 시각 검사를 가동하는 섬유 셀은 옆 셀과 같아 보이며, 추가 구성 요소 하나만 있습니다. 리퍼비시 iPhone이 직기 테이크업, 편직 테이크다운, 또는 가공 범위를 떠나는 원단의 아래쪽 또는 각도가 있는 뷰가 있는 스탠드에 마운트되거나, 라인과 창고 사이의 전용 검사 프레임 위에 앉습니다. 단순한 LED 바가 카메라에 모든 미터에서 같은 빛을 줍니다.
원단이 카메라 아래에서 가동되면, iPhone은 라인 속도로 사진을 찍고 모델은 각 프레임을 OK 또는 위의 7개 결함 패밀리 중 하나로 분류한 다음, 결과를 자기 롤 기록에 씁니다. 한 구간이 연속으로 표시된 미터 20개를 주면, 운영자는 알림을 받습니다. 가공 범위가 하루 동안 느린 색조 드리프트를 보이면, 대시보드는 실험실이 표시하기 전에 표시합니다.
모델은 전날의 라벨에서 밤새 재학습되므로, 실 교체, 빔 교체, 또는 가공 교체는 한 분기가 아닌 한 교대에 흡수됩니다. 신규 품번은 같은 흐름을 거칩니다. 운영자가 첫 100미터를 라벨링하고, 모델이 미터 101부터 인계받으며, 섬유 엔지니어가 교대 종료에 라벨을 검토합니다.
사양을 벗어난 미터는 4점 프레임에 도달하지 못하고, 거부는 분기별 감사가 아닌 검사 지점에서 기록되며, 운영자는 빔 셋업, 가공 화학, 고객 클레임 등 여전히 사람이 필요한 작업에 필요한 주의 시간을 되찾습니다.
섬유 라인에서 AI 비전 대 수동 점검
수동 4점 등급 또는 룰 기반 머신 비전에서 AI 주도 검사로 이동하는 라인은 섬유 유형이나 품번 구성에 관계없이 같은 단계 변화를 봅니다.
미세한 결함의 검출률 — 기존 머신 비전 (testextextile, brightpoint.ai, robrosystems, ai-innovate, Cognex, xis.ai)은 출하 전에 라벨링된 이미지 라이브러리와 6자리 통합이 필요합니다. Enao는 라벨링된 데이터 없이 첫날 80% 정확도에 도달하고, 자기 운영자가 iPhone에서 수백 개의 예제를 태그하면서 95% 이상으로 올라갑니다.
신규 품번이나 원단을 처리하는 시간 — 수동: 검사원 브리핑, 골든 스와치, 종이 QC 시트. 현장이 신규 품번을 유창하게 읽기까지 2~4주. Enao: 100미터 라벨링되면 모델 가동. 같은 교대, 모든 라인에서 갱신할 종이 시트 없음.
고객이 돌아올 때의 추적성 — 수동: 손으로 작성한 4점 시트, 부분 커버리지, 누락된 교대. 재구성에 1주 걸림. Enao: 모든 미터가 이미지, 분류, 신뢰도와 함께 기록됩니다. 재구성에 10분.
가동 비용 — 수동: 라인당 교대당 검사원 추가, 교육에 더해 반복 월별 비용. Enao: 셀당 하드웨어 1,000유로 미만. 공장이 확장되는 동안 비용은 일정합니다.
빔이나 가공이 드리프트할 때의 동작 — 수동: 고객이 표시할 때까지 점진적 거부가 올라갑니다. 그 순간을 찾기 위한 며칠의 근본 원인 작업. Enao: 대시보드가 시작되는 미터의 바레나 색조 드리프트를 보여줍니다. 섬유 엔지니어는 시간 스탬프와 이미지를 가지고 있습니다.